

 联系我们
联系我们

在硬件连接过程中,利用机器人的通用数字输出信号DO102驱动电磁阀,通过真空发生器产生气压,然后连接到吸盘上。
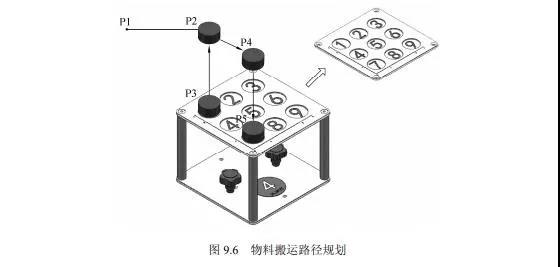
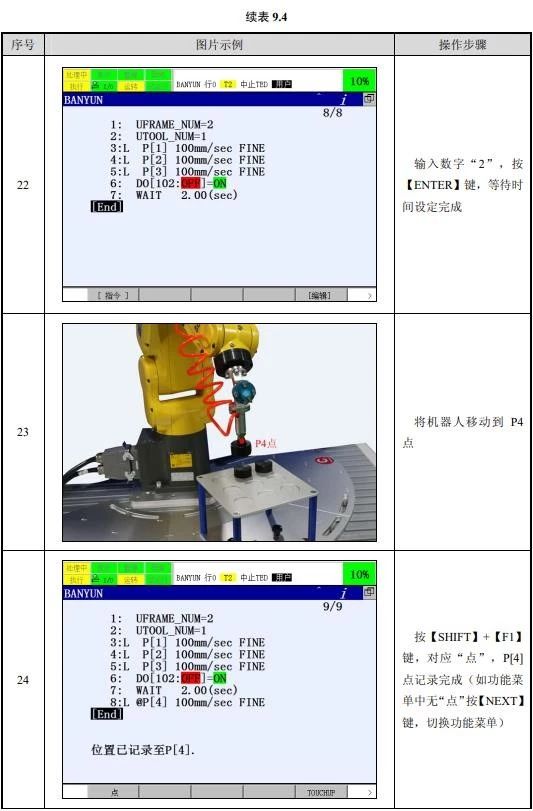
路径规划:初始点 P1 →圆饼 1 抬起点 P2→圆饼 1 拾取点 P3→圆饼 1 抬起点 P2→圆饼 7 抬起点 P4→圆饼 7 拾取点 P5→圆饼 7 抬起点 P4→初始点 P1。
编程前需要完成的步骤:
(1)安装搬运模块。
材料处理的例子
(2)将工具安装在机器人法兰的末端。
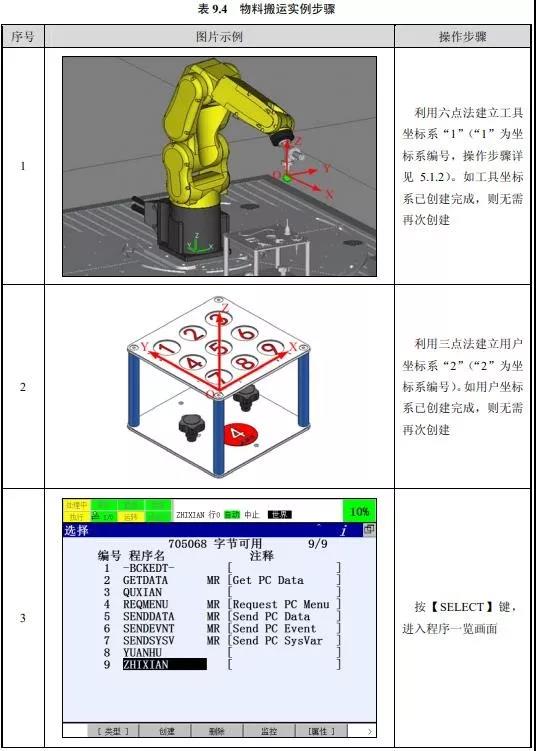
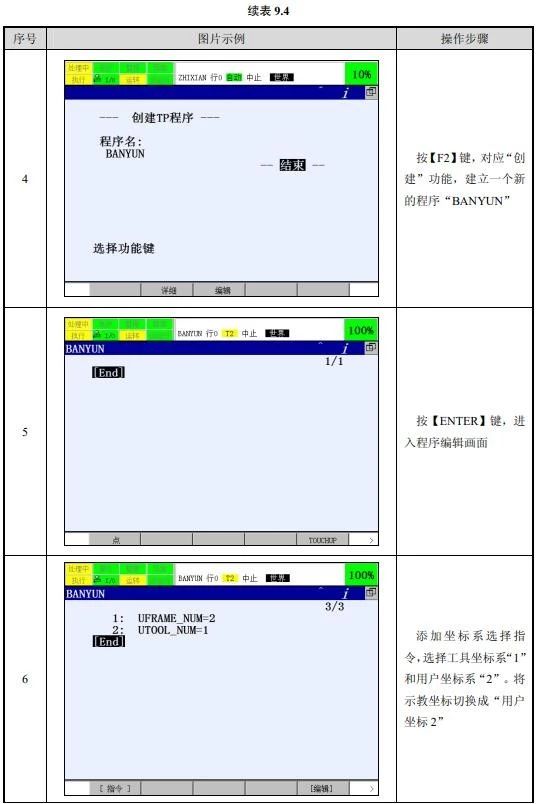
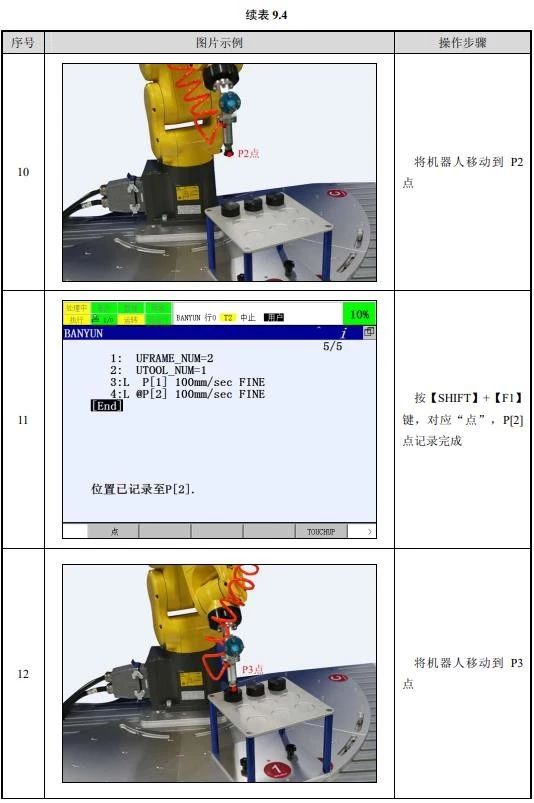
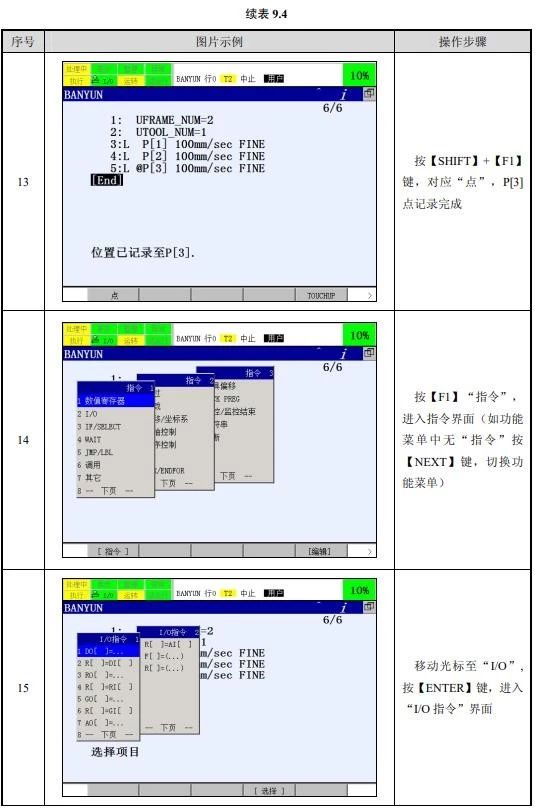
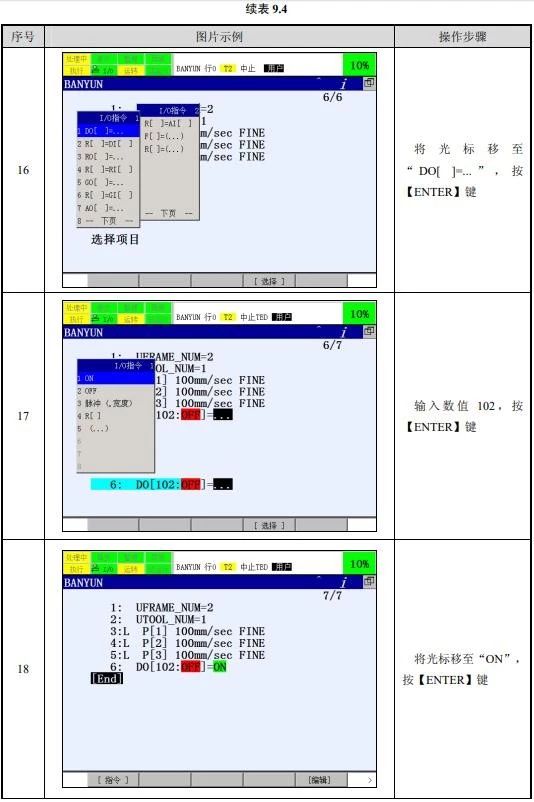
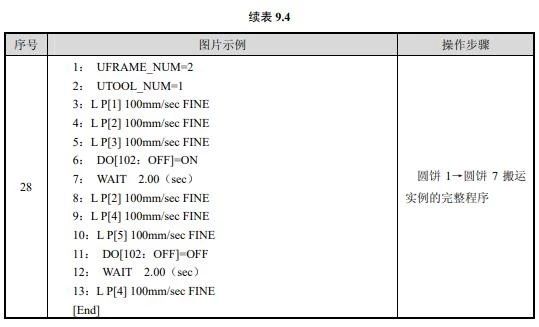
物料搬运实例步骤见表 9.4。



以上内容转载于网络
更多:发那科机器人
