

 联系我们
联系我们

一般来说,在操作FANUC机器人时,需要使用iPendant,即FANUC讲师来教机器人,做信号配置等。对于熟练使用教学设备的用户来说,教学设备是他们用来控制机器人的工具。你能在没有老师的情况下控制机器人吗?答案是肯定的。
Jogging iPendant(JITP)
Jogging iPendant(JITP)功能,正是用来使用PC或平板电脑来操作机器人的一种功能。在这种功能下,需先使用示教器,设置IP地址,与PC或平板电脑通过网线连接。然后便可以使用PC或平板电脑登陆浏览器,访问机器人的IP地址,并进入如下图的页面。
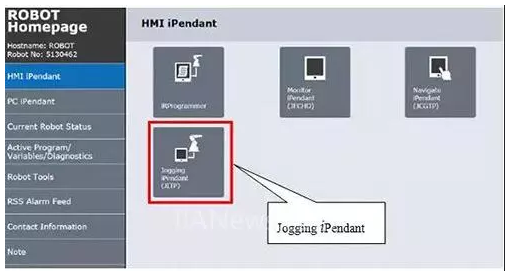
点击JITP图标后,示教器便与机器人断开,如图所示:

在PC或平板电脑上,你可以看到下面的图片。操作模式与实际教学设备一致,习惯教学设备操作的用户不存在障碍。

使用JITP,可以操作的有(包含但不局限于以下内容):
1.机器人动作,如点动,运行TP程序;
2.前台TP程序编辑;
3.改变坐标系;
4.改变速度倍率;
5.改变TP模式(Enable/Disable);
6.应用DCS参数;
7.消除DCS报警。
iRProgrammer
2017年发那科推出了新的SCARA机器人,它有一个不同于其他类型机器人的控制器,我们称之为Compact Plus控制器。与JITP不同,紧凑型Plus控制器提供了更新的操作模式。JITP可以在没有教练的情况下操作机器人,但需要一名教练。JITP可以在没有教练的情况下操作机器人,但需要一名教练。
而对于Compact Plus控制器,示教器是一种选项。
用户在订购机器人时,可以不选配示教器。
对于没有配备示教器的机器人,有一种新的功能,即iRProgrammer。
与JITP相同的是,使用PC或平板电脑通过网线连接到控制上,进入以下页面:
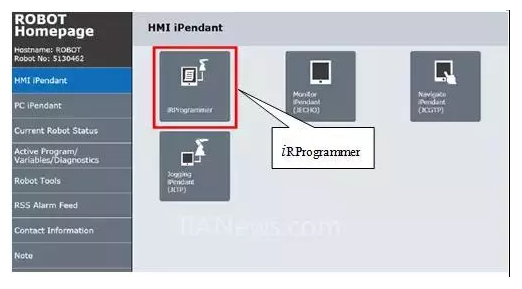
点击图标,可以看到如下的结构画面:

使用iRProgrammer,可以操作的有(包含但不局限于以下内容):
程序编辑:
1.文本编辑器;
2.编辑位置数据;
3.点动操作;
4.通过PC或平板电脑运行程序;
机器人设置:
1.设置和监控界面(坐标系,负载,I/O,等等)。
注意事项
JITP或iRProgrammer操作机器人由于其必须在自动模式下,用户必须安全栅栏外可以运作,并确保没有其他人在安全栅栏,同时应该准备好停止(应该准备好停止同时,注意安全),为了保证用户的安全,避免碰撞的机器人和其他设备。
转载于:机器人在线
更多:ABB机器人
