

 联系我们
联系我们

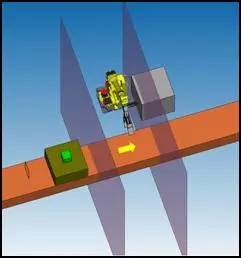
在物流搬运、喷涂等应用中,工件通常是通过传动方式传送的。在传动过程中,考虑到系统的节奏,输送带往往会进行连续运动,在机器人搬运或喷涂工件的过程中不会停止运动。那么机器人如何在移动的过程中准确的移动工件,如何完成高质量的喷涂呢?机器人的轨迹跟踪功能使机器人在工件的连续运动中完成高质量的工作。
为了在现场系统环境中实现轨迹跟踪的功能,需要在输送带上安装传感器和编码器来检测工件的存在和位置,而在Roboguide仿真环境中,不需要添加硬件。然而,无论是在现场还是仿真环境中,轨迹跟踪软件都需要安装在机器人控制柜中。
使用线跟踪功能,需要设置传送带一个机器人工作空间(如图),工件在工作区域机器人抓取工件块或喷涂工件还没有进入工作区域,示踪剂的停留在第1点的机器人,一旦工件进入工作区域,发那科机器人提交抓住或油漆。
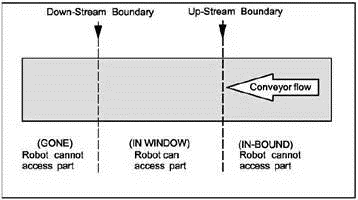
监测工作区域是通过编码器,传感器安装在传送带上,首先,该系统通过传感器安装在传送带上——绑定地区已经进入了传感器工件,在工件的工作区边界位置,流边界,由编码器,识别系统启动超边界函数,建立合理的机器人抓取等待时间,机器人会根据工件区域的位置来确定是否有足够的时间进行抓取,如果没有足够的时间忽略所有的动作点,那么重置机器人的抓取等待时间直到满足要求。
直线跟踪功能往往要求工件做直线进给运动并制定规则。当工件不规则地放置在传送带上时,通常采用视觉跟踪来识别工件。视觉跟踪功能在直线跟踪功能的基础上增加了视觉系统。通过拍照来识别工件的方向,从而实现对工件的准确捕捉。与直线跟踪相比,视觉跟踪具有以下优点:系统设置简单,程序更简洁,触发精度高,机器人拍速可以小于直线速度拍速,多机器人协同行动。
直线跟踪功能或视觉跟踪功能使机器人能够自动补偿工件沿导轨的流动,即将***运动的工件视为相对静止的物体。机器人可以在不停机的情况下操作流水线上的工件。
以上内容转载于:机器人在线
更多:发那科机器人
