

 联系我们
联系我们

fanuc机器人建立零件支架和轨迹参数的具体步骤如下:
1) 开启 Cell Browser
2) 单击 Fixtures
3) 右击Generic Simple Conveyor
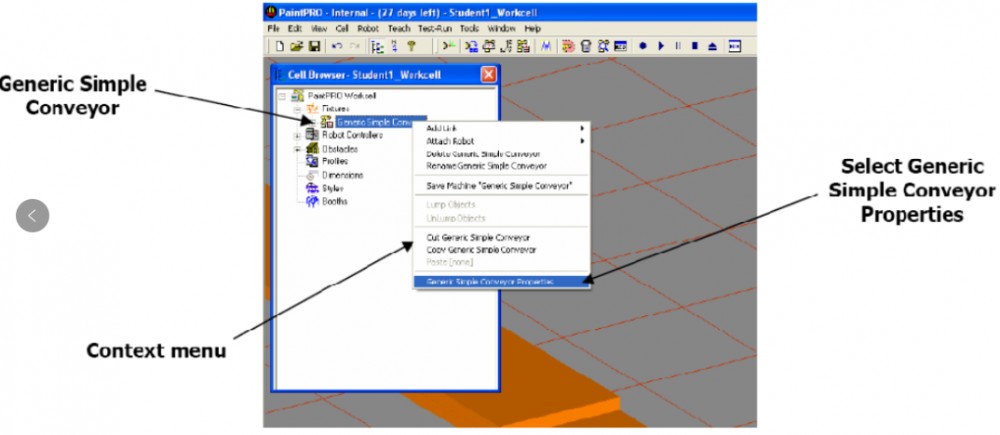
4) 选择 Generic Simple Conveyor Properties
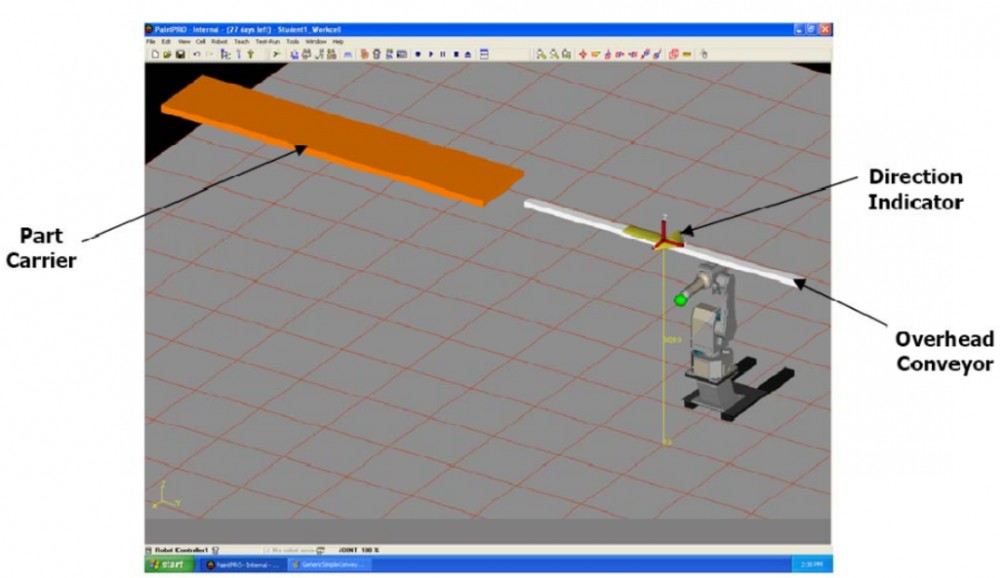
5) 将名字改为 Overhead Conveyor
6) 将 Overhead Conveyor X 方向的 Size 改为 127mm
7) 将 Overhead Conveyor Y 方向的 Size 改为 4267mm
8) 将 Overhead Conveyor Z 方向的 Size 改为 76mm
9) 将 Overhead Conveyor Z 方向的 Location 改为 3028mm
10) 单击 OK 关闭对话框
11) 双击 Part Carrier
12) 单击
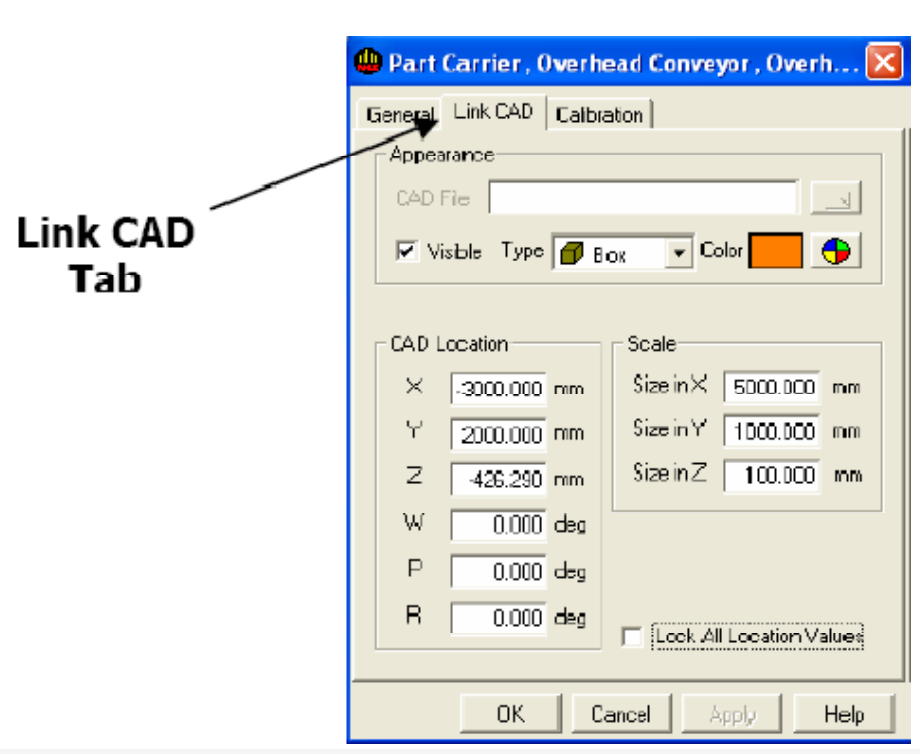
13) 将 X 方向的 Size 改为 40mm
14) 将 Y 方向的 Size 改为 40mm
15) 将 Z 方向的 Size 改为 1066.8mm
16) 在 CAD Location 部分,将 X 方向的值改为 1960
17) 在 CAD Location 部分,将 Z 方向的值改为‐603.871
18) 点击 OK 关闭对话框。
19) 在 Cell Browser 上右键点击 Part Carrier
20) 选择 Add
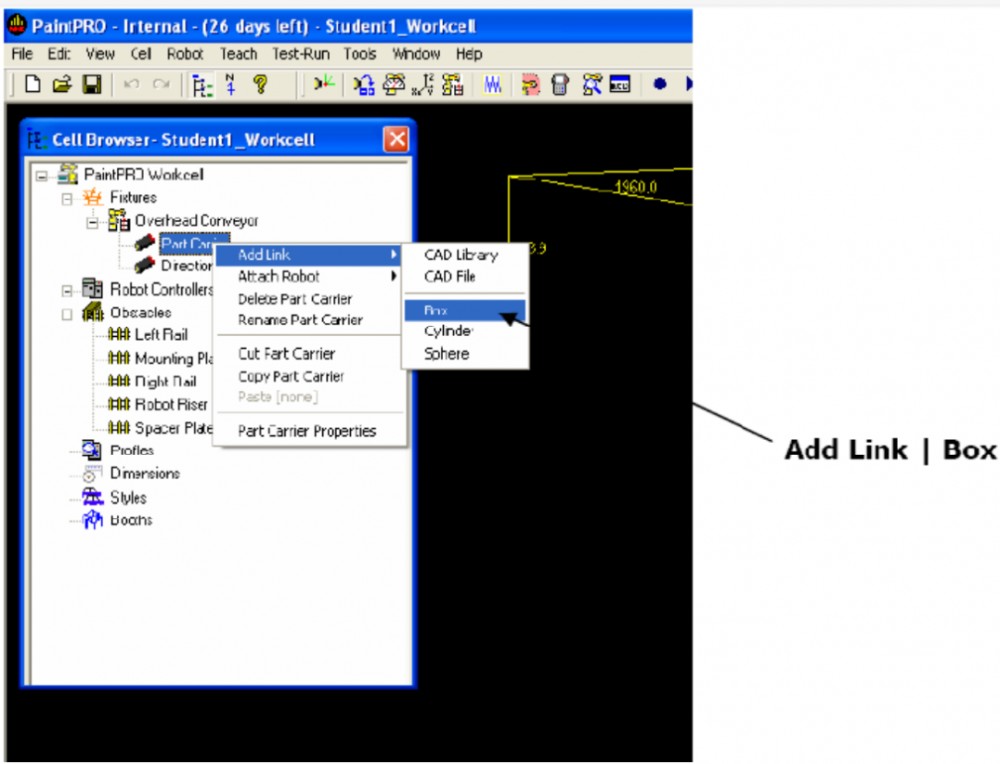
21) 在出现的对话框中将名字改为 Part Carrier Extension 1
22) 点击
23) 将 Scale 部分的 X 方向数值改为 40mm
24) 将 Scale 部分的 Y 方向数值改为 40mm
25) 将 Scale 部分的 Z 方向数值改为 295mm
26) 将 CAD Location 部分的 Y 方向数值改为 5.6mm
27) 将 CAD Location 部分的 Z 方向数值改为‐1053mm
28) 将 CAD Location 部分的 W 方向数值改为‐45degrees
29) 点击 OK 关闭
30) 在 cell browser 中,右键点击 Part Carrier Extension 1
31) 选择 Add
32) 将新出现的 BOX 名字改为 Part Carrier Extension 2
33) 点击 Part Carrier Extension 2 的
34) 将 Scale 部分的 X 值改为 120mm
35) 将 Scale 部分的 Y 值改为 76.2mm
36) 将 Scale 部分的 Z 值改为 1066.8mm
37) 将 CAD Location 部分的 Y 值改为‐3mm
38) 将 CAD Location 部分的 Z 值改为‐274mm
39) 将 CAD Location 部分的 W 值改为 45degree
40) 点击 OK 关闭对话框。
41) 双击 Direction Indicator
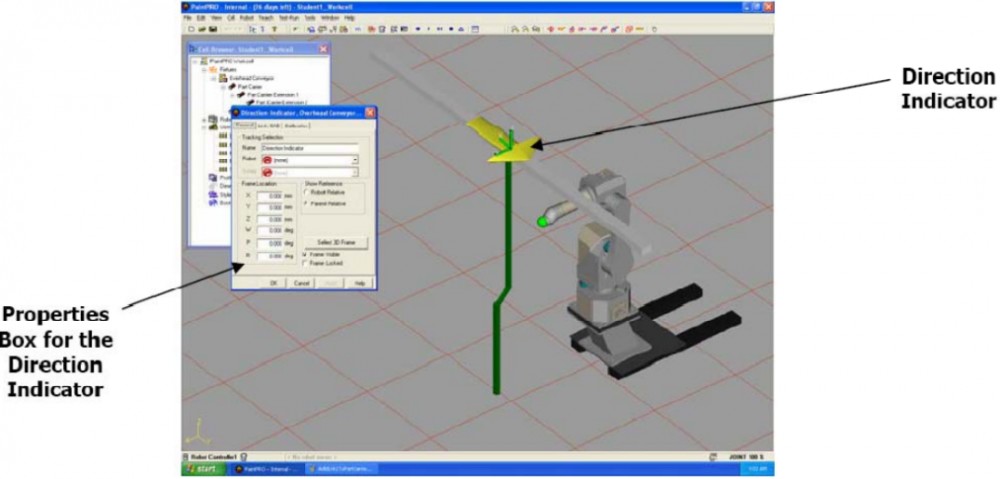
42) 在出现的对话框中,根据你自己的需要改变参数:Scale,location 等。
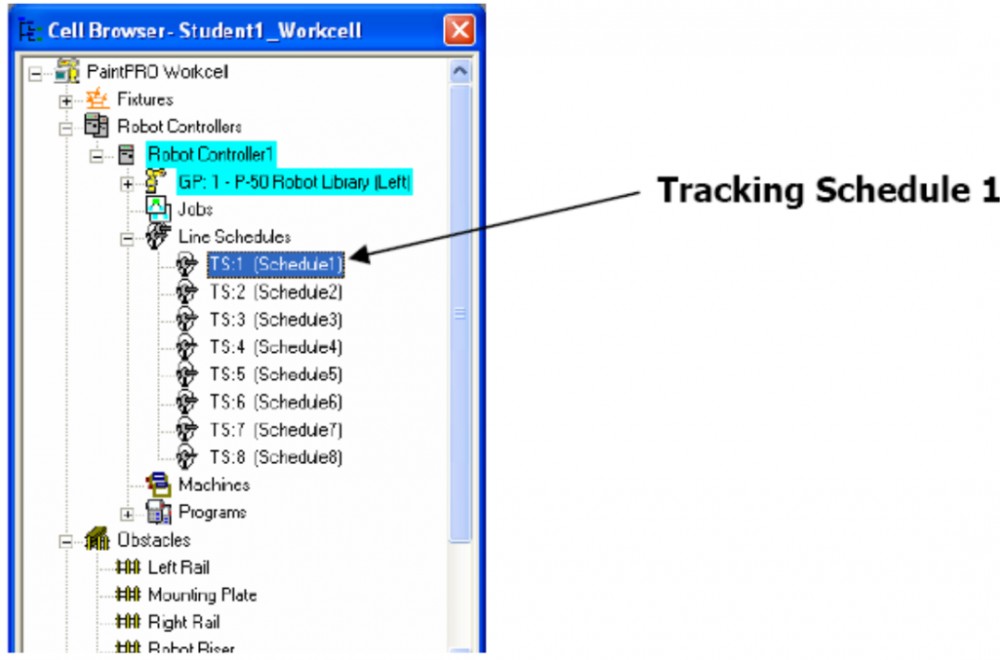
43) 打开 cell browser
44) 双击  ,打开属性界面。
,打开属性界面。
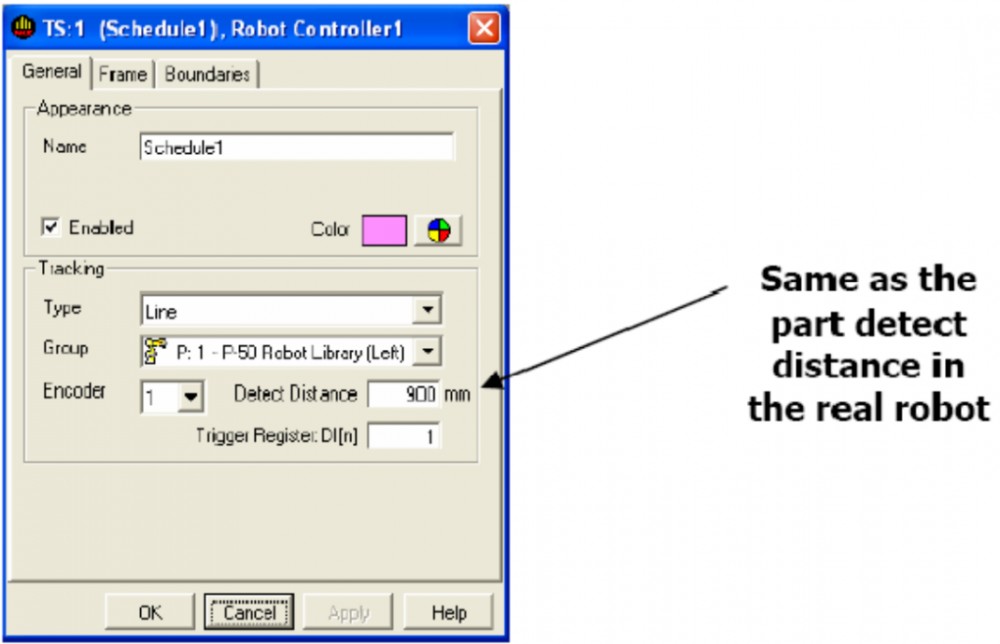
45) 在 General 栏上的 Tracking 部分把数值改为 900mm。
46) 点击 Boundaries 栏
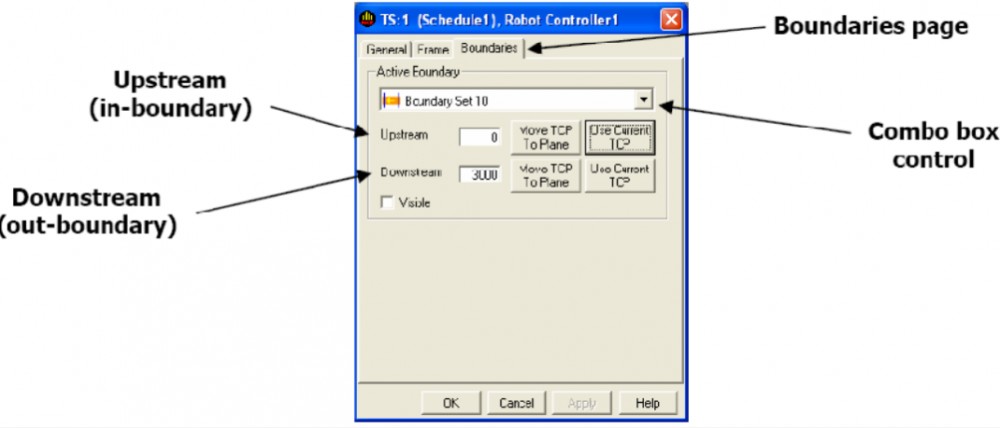
47) 将 Boundary Set 10 的 Upstream 数值改为‐1100mm。
48) 将 Boundary Set 10 的 Downstream 数值改为 1100mm。
49) 点击下拉菜单,将 Boundary Set 9 的数值设置。
50) 设置其他的 Boundary Set 的数值。
51) 点击 OK,关闭对话框。
转载于:机器人在线
更多:发那科机器人
